DESARROLLO DE UNA COMPUTADORA OPTO-ELECTRONICA PARA EL
RECONOCIMIENTO DE PATRONES
BIDIMENSIONALES
POR TECNICAS
NEUROCOMPUTACIONALES
W.W.Mayo1 Cuevas (UNAM) & E. Gómez Ramírez
Universidad La Salle
Laboratorio del Centro de lnvestigación
RESUMEN
El estudio de arquitecturas ópticas, en años recientes ha mostrado a éstas con claras ventajas sobre las arquitecturas convencionales (V.Newman). por
características inherentes como son: procesamiento en paralelo, masiva interconectividad, entre otras; mismas que son comunes en sistemas o modelos
como las redes neuronales. siendo entonces permisible una combinación de ambas ideas, consiguiendo un aumento significativo en sus cua lidades. Se
presenta el desarrollo e implementación de una neurocomputadora optoelect rónica con características asociativas para el reconocimiento de patrones en
dos dimensiones,tanto en su simulación por computadora como su implementación física.
INTRODUCCION
La necesidad de encontrar formas más eficientes para resolver cierto tipo de tareas que involucran gran manejo de información. como el reconocimiento
de patrones (Awwal, 1988), procesamiento de imágenes . etc.. ha provocado la búsqueda de nuevas técnicas en orden de acelerar el procesam iento de
datos; resaltando arquitecturas que si bien no eran del todo desconocidas -como es la computación óptica-, en años recientes han sido trabajadas con
mayor intensidad.
La computación óptica consiste esencialmente en la manipulación de fotones en procesos semejantes a un manejo digital o analógico. obteniendo un
incremento substancial en la velocidad con que se procesa;a su vez.tiene características inherentes que le dan su ventaja sobre las técnicas
tradicionales (lchioka,1984):
- Por la naturaleza del fotón, tecnológicamente es más fácil el procesamiento en paralelo, que en arquitecturas con manejo de electrones .
- Los fotones en espacio libre tienen un comportamiento "homogéneo" y en cierta medida ordenado , a diferencia de los electrones que en estas
condiciones provocan ciertas dificultades.
- La computación electrónica , está llegando a ciertos límites en su miniaturización, en tanto que en computación óptica se está todavía lejos de
límites impuestos por la interacción del fotón.
- En ciertos casos (como los presentados en este trabajo), la misma arquitectura de procesamiento, es utilizable tanto para procesamiento de señales
digitales como analógicas.
Por otro lado, las redes neuronales (o redes conexionistas) , han presentado un gran potencial en tareas como el reconocimiento y clasificación de
patrones; este tipo de modelos, consisten en bloques altamente interconectados , que realizan procesamiento de información mediante elementos simples
(Rayón, 1990)(Uppman ,1984).
La interconexión masiva y la capacidad de la computación óptica de trabajar en paraleto, son las ventajas principales de este tipo de arquitectura ,
que son empleadas por modelos como las redes neuronales. lo que permite que dicha combinación aumente significativamente cualidades en ambos
(Xiang,1990)(Francis, 1990, 1991).
DESCRIPCION
En este trabajo se presenta la construcción de una red neuronal ópt ica de 64 nodos (8x8) con memorias auto y heteroasociativas (unidireccionales y
bidireccionales) así como clasificadores de patrones (caracteres) en dos dimensiones.
La arquitectura de la red se divide en tres partes: patrón de entrada, matriz de interconexión de pesos (MIP} y matriz de fotosensores. (fig. 1)
PATRON DE ENTRADA
El modelo consiste esencialmente en presentar un patrón de entrada mediante una matriz de led's de 8x8 (fuente de luz coherente) y multiplicarlo por
medio de métodos ópticos por la matriz de interconexión de pesos correspondiente (MIP), el resultado de esta operación para algunos casos. se
retroalirnenta consiguiendo asl las iteraciones necesarias.
Como se observa en la fig. 1 del patrón de entrada representado en una matriz de led·s de 8x8 es controlado por medio de una computadora PC y un
circuito electrónico diseñado especialmente para guardar los diferentes patrones. La información a representar es enviada
por el puerto paralelo utilizando únicamente 6 bits de la siguiente fonna:
BITS 2-5
FUNCION
información reloj
clear
El diseño de este circuito fue hecho de manera que se pudiera configurar a un mayor número de neuronas (patrones de entrada) utilizando únicamente los
mismos 6 bits.
Con el bit de reloj se selecciona el grupo de leds (grupos de 4 leds) a los cuales se envía la información. En la figura 2 se puede observar el
diagrama del circuito
La mecánica de procesamiento, se basa en la técn ica conocida como shadow-casting (distribución de sombras), que dependiendo de los estados existentes
en las entradas y en la MIP. se obtienen resultados en intensidades de luz en la matriz de fotosensores, que serán discriminados por un umbral
predeterminado para establecer el resultado. que en ciertos casos será entregado como una nueva entrada al sistema.

Fig.1. Red neuronal óptica (híbrida), con arreglo de LED's.
El estado de cada neurona , puede ser expresado por la siguiente ecuación:

Donde vi es el estado de la i-ésima neurona, n es la n-ésima iteración. T¡j representa la conexión existente entre las neuronas i y j, y f es un
operador no-líneal.
como:
Como ejemplo, si las neuronas operan corno una función de umbral, f puede describirse
donde: t es el valor de umbral.
Nótese que el operador funcional de la ecuación (1) es un operador que depende del producto de la MIP por un vector que puede ser expresado para una
dimensión como:
V(n+ 1) = f[TV(n)] (3)
donde V es el estado de las neuronas, y T la MJP.
La ecuación para una red neuronal de dos dimensiones N x N puede ser definida como:
 (4)
(4)
Donde v1k representa el estado de la lk-ésima neurona en un espacio de N x N y Tlkij es una MIP de cuatro dimensiones que puede ser dividida en un
arreglo de subrnatrices de dos
dimensiones T11ij· T12ij· .. Tlkij· en donde cada una de estas submatrices, tiene un tamaño de N x N.
!!!!!!!!!!!!!!!!!
14!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Fíg. 2. Interface controladora de la matriz. de LEDs, vía PC.

MATRIZ OE INTERCONECCION DE PESOS (MIP)
La matriz de interconexión de pesos. es aquella que se encuentra entre la matriz de entrada (o de LEDs) y la matriz de resultados (o
sensores). La MIP posee los estados de los pesos de la red (en este caso se trabajaron estados binarios); como se explica en la ec.(4) , la MIP es una
matriz dividida en subceldas (fig. 3).
Fig. 3. Formato de una MIP de cuatro dimensiones dividida en subceldas.
Los estados que contiene la MIP son aquéllos que serán multiplicados por las entradas; cada nodo o LEO de entrada, multiplica (ilumina) a toda la MIP,
he aquí, como es que se representan las interconecciones en computación óptica, y nótese que el tamai\o de la matriz no es relevante en la velocidad
con que se procesa. puesto que esto se lleva a cabo en paralelo.
La forma de generar la M!P depende del algoritmo con que se esté trabajando . Se presentan dos métodos para dicha tarea: a) el modelo de lnter Pattem
Association (IPA}, y b) el método por distancia de Hamming.
a) Modelo de IPA:
Este método para generar la MIP, consiste en evaluar la relación de "pixeles" de las entradas y salidad deseadas v.g. Tab. '! y 2, aplicando las
ecuaciones correspondientes.
Entradas


Fig. 4 . Patrones binarios. a) Patrones a entrenar. b) Salidas deseadas.

Si se define que el arreglo de neuronas de entrada-salida es O = { o1 ¡. I= 1,2...M • i= 1,2,..N} y D'= {D'1 i· 1=1,2,..M, J=1,2,..N'} donde M es el número de patrones de entrada a entrenar, y N y N' son el número de neuronas o nodos de entrada y de salida
respectivamente. se tiene que:
 (5)
(5)
 (6)
(6)
Donde di y d'j son el número de patrones que poseen estado "1" en la i-ésima y j-ésima neurona de salida y entrada respectivamente. Nótese que en la
ec.(5) y ec.(6), d¡ y d'¡. se
determinan sumando los elementos de la columna correspondiente de las tablas de relación (Tab. 1 y 2).
Entonces. la MIP se construye bajo los siguientes condicionales para Kij ec.(7) :
1.- Si Kij = di, la subcelda valdrá "1"
2.- Si O < K¡¡< d¡, la subcelda valdrá "O"
3.- Si Kij = O, di <> O y d'j <>O, la subcelda valdrá "1"
En la fig. 5 se presenta un ejemplo de construcción de la MIP, para los patrones de ra
fig. 4, bajo el método de IPA.

Fig. 5. Construcción de la MIP bajo el método de IPA. para tres estados. a) MIP heteroasociativa unidireccional. b) estados.
b) Método por distancia de Hamming:
Este método consiste en una red clasificadora, que mediante la distancia de Hamming, se obtiene que tan parecido es un patrón con respecto a otro. El
método de codificación empleado es el binario,como se muestra en la figura 3 y un ejemplo de codificación es el que se muestra en la fig. 4.

Fig. 5 Forma de codificar patrones binarios para obtener la distancia de Hammlng existente entre ellos. =encendido/transparente y¡¡¡=apagado/opaco.

Fig.6 Ejemplo de obtención de la distancia de Hamming entre dos matrices. a)Patrón A codificado. b)Patrón 8 codificado. =encendido/transparente
y¡\¡=apagado/opaco.
Una vez dispuestos los dos patrones interactuantes en los LEOs y en el acetato, codificados adecuadamente, el resultado será entregado en el punto
central de la matriz resultante. dado por la ec.(8).
 (8)
(8)
Donde z es el resultado de la operación de distancia de Hamming, con valores enteros de o hasta n (número de elementos de la matriz de LEOs), donde O
significa que no existe
diferencia entre los patrones y cada número entero en intensidade s de luz, es aproximadamente
la intensidad de un LEO encendido con el que se esté trabajando : aij y bij son los estados binarios existentes en la matriz de LEDs (patrón A) y en el
acetato (patrón B) respectivamente.
Para generar una red clasificadora de patrones en dos dimensiones, se colocan codificados en el acetato (MIP) los patrones deseados. siguiendo el mismo
esquema que en la fig.3, y si se aplicano diferentes umbrales a las intensidades recibidas. se obtiene a que celda de la MIP pertenece el patrón dado
en la matriz de LEDs.
MATRlZ
DE
FOTOSENSORES
Una vez que se realizan las operaciones de forma óptica, los resultados que se obtienen, son intensidades de luz que están en relación con los estados
existentes en el patrón de entrada y la MIP; y que indican la coincidencia entre estas matrices. Estas intensidades deben de ser discriminadas para
obtener el resultado final. esto se lleva a cabo mediante fotosensores, que poseen un umbral predeterminado. Estos datos se envían a la computadora,
como valores discretos (1, O), para su posterior procesamiento, que de acuerdo con la arquitectura podrían ser entregados a la matriz de LEDs como
nuevo patrón de entrada.
RESULTADOS
A continuación se presentan algunos ejemplos de los resultados obtenidos:
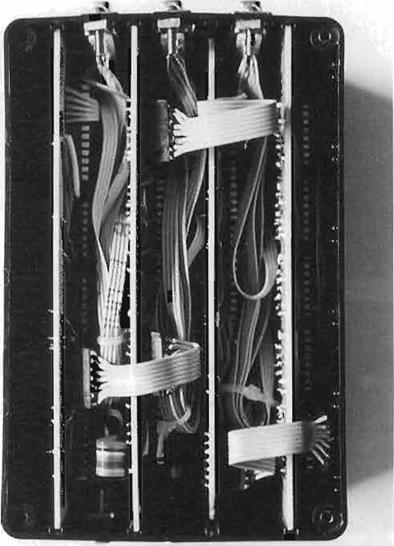
Foto 1 Red neuronal óptica de 64 neuronas (8X8).
 (b')
(b')
(c')
Fot. 2 MIP au1o-asociativa. a) Patrón almacenado. b, b' y b") entrada sin distorsión, interpaso y salida. e, e' y e") entrada con distorsión, ínterpaso
y salida.
Fot. 3 MIP he ero asociativa unidireccional. a)patrón asociado con "z". b, b' y b")entrada sin distorsión.interpaso y salida. c. e· y e") ent rada con
distorsión. interpaso y salida.
 ( aX)
( aX)
X
( e )
(b') (e')
Fot. 4 MIP helero asociativa bidireccional. a) patrones almacenados. b,b'yb") entrada. interpaso y salida. c,c'y c") entrada. interpaso y salida.
CO
N
CLUSION
E
S
Las técnicas de computación óptica, por sus características, principalmente velocidad y procesamiento en paralelo con gran cantidad de información,
propicia la implementación de modelos como las redes neuronales. obteniendo ventajas significativas.
La búsqueda de métodos de codificación y algoritmos más eficientes para el paralelismo en óptica, mejorará las implementaciones en este tipo de
arquttectura.
BIBLIOGRAFIA
1.- Lipmman P. An introduction to computing with neural nets. I EEE A SSP Magazine. 1987.
2.- lchioka Y.& Tanida J. Optical parallel !ogic gatas using a shadow-casting system for optical digitalcomputing. I EEE. Vol. 72 No. 7.
1984.
3.- Francis T.,Taiwei L.& Xiangyang Y. Optical implementation of helero association neural network with inter-pattem association model. l ot. Journal of OpticalComputing. 1990.
4.- Francis T. Taiwei L. & Xiang Y. Optical neural network with pocket sized liquid crystal televisions. Optical Society of Amer ica.
1990.
5.- Francis T. Taiwei L. Space-time sharing optical neural network. Optical Society of America.
1991.
6.- Xiang Y. Taíwei L.& Francis T. Compact optical neural network usíng cascaded liquíd crystal television. Applied Optics. 1990.
7.- Figueroa J. Programa de investigación en computación óptica. Sirnposium Naci onal de Computación: Tendencias dela comput ación en la decada de los 90. IPN-CNC. 1991.
8.- Brenner K.,Huang A.& Streibl N. Digital optical computing with simbolic substitution. Applied
. 1986.
9.- Awwal A & Karirn M. Edge detection using polarization encoded optical shadow casting. Microwaye and Optical Technology Letters.1988.
10.- González H..Gómez E.. et al. Neuromex 11: una neurocornputadora experimental. MEXICQN
89
. 1989.
11.- Rayón P.& Górnez E. Construcción y análisis exprirnental de un nodo neuronal. Congreso Nal. de Fl sica. 1990.
12 .· Gómez E. & Martfnez G. Construcción de una neurocomputadora utilizando microcontroladores. XXXIV Congreso Nal. de Flsica. 1991.
13.- Wolfe, A. Optical computing is beginning to take on the glow of reality.Electroni cs Week. Juoe 1o. 1985.