![]() 203
203
ANÁLISIS Y PROCESAMIENTO DE IMÁGENES DIGITALES POR MEDIO DE TÉCNICAS CO M PUTACIONALES
H ugo G. González-Hemández y Mario Farias.f linos Laboratorio del Centro de Investigación, Universidad La Salle
RESU MEN
En el presente trabajo se muestra un programa especíallzado para el procesamiento y análisis de Imágenes con formato estándar proveniente de un digitalizador de Imágenes (frame grabber). Con este programa, desarrollado por los autores es posible aplicar diferentes técnicas computacionales de mejoramiento de imágenes, filtros, espectros en frecuencia, análisis morfológicos, segmentado de regiones, procesamientos puntuales o por áreas, y otros más. Estas técnicas son aplicadas tanto para Medicina como para Robótica y Visión Artificial y pueden ser extendidas para otras aplicaciones.
ABSTRACT
In the present work, we present a specialized program for image processing and analysis in a standard format which come from a image digitizer (frame grabber). With this program, developed by the authors, it is possible to apply different computational techniques for image correction, filters. frequency spectrums, morphological analysis, region segmentation, point and area processes, and others. This techniques are applied in Medicine, in Robotics and in Artificial Vísíon, and they can be extended to other applications.
I NTRODUCCIÓN principalmente. la sección de Técnicas de Procesamiento y la de Aplicaciones.
En la actualidad los paquetes comerciales de procesamiento de rmágenes son relativamente caros. el presente trabajo muestra un conjunto de técnicas implementadas (librerias) integradas en un solo programa. El Procesamiento de Imágenes es una disciplina relativamente joven que, debido al actual desarrollo de las computadoras a bajo precio y de mayor rendimiento, ha ido evolucionando. Ahora es posible llevar a cabo procesamientos relativamente complicados en una computadora personal, lo que antes era casi exclusivo para estaciones de trabajo.
En medio de esta evolución la Visión Artificial ha ido también desarrollándose hacia diferentes áreas, principalmente en ambientes médicos e ingenieriles donde es necesario ya sea mejorar la imagen, resaltar ciertas características de la imagen o reconocer parte de ella y separarla o hacer un cierto procesamiento solo a una región de la imagen. El trabajo se presenta dividido en dos secciones
TÉCNICAS DE PROCESAMIENTO
Es necesario el contar con una tarjeta digitalizadora que nos permita adquirir la señal de la cámara que capta la imagen. Actualmente en el mercado se cuenta con diferentes tarjetas de adquisición como la VldeoBlaster, Matrox y muchas más. En nuestro Laboratorio se realizó una tarjeta capaz de digitalizar una sei'lal de video estándar NTSC. Con esta tarjeta es posible obtener una imagen en formato estándar PCX que se puede ya sea almacenar en memoria o en pantalla para su posterior utilización.
La imagen adquirida no siempre es la ideal para realizar alguna tarea específica; es necesario llevar a cabo cierto preprocesamiento que consiste, generalmente, en quitar el ruido a la imagen por medio de diferentes filtros, o mejorar el contraste debido a una falta o exceso
![]() 203
203

de iluminación o tal vez reescalar los niveles de gris para mejorar la percepción de la Imagen. Hasta ahora. I implementación de técnicas automáticas que permitan seleccionar un mejoramiento de la imagen es bastante complicada. Esta tarea se realiza en forma
Interactiva como prueba y error.

I m agen original con 256 tonos de gris .
Contraste
El ajuste de contrastes es siempre necesario hacerlo para el proceso de adquisición de la
imagen. La iluminación puede no ser uniforme, el nivel de cuantlzación de la imagen puede ser muy alta o baja. En la mayoría de los casos es posible corregir o mejorar la imagen cambiando el rango o frecuencia relativa de los niveles de gris.
El contraste se define como:

Contraste negativo de la imagen.

Contraste positivo de la Imagen.
I m agen negativa
Esta puede ser obtenida por el escalamiento inverso de los niveles de gris de acuerdo a la transformación
donde:
C(i,J) = l(i,J) +h
donde:
V es la intensidad del pixel.
b valor inverso a partir del umbral.
V =V +b
h La intensidad de luz.
I La imagen de entrada.
e La imagen de salida.
La digitalización negativa es empleada en el desplegado de imágenes médicas y en la producción de impresiones negativas de
imágenes.
![]() 204
204

Negativo de la imagen.
El código de cadena resultante del programa es: 6666666555666666000006 66000000000111
0000222233322233322244444444444 .
H i stograma
En esta técnica lo que se obtiene es Ja distribución de Jos niveles de gris de una imagen. Con esta información se puede saber la cantidad de pixeles con un tono de gris en especial. Esta información permite realizar
 diferentes tipos de mejoramiento como ecualización del histograma obteniendo imágenes con una distribución uniforme de grises. El histograma de la
imagen que se obtiene es la que a continuación se presenta:
diferentes tipos de mejoramiento como ecualización del histograma obteniendo imágenes con una distribución uniforme de grises. El histograma de la
imagen que se obtiene es la que a continuación se presenta:
![]()
1 1
H istograma de la imagen.
Códigos de caden a
Entre las técnicas de compresión de imágenes contamos con ésta que puede realizarse con conexidad-4 o con conexidad-8. La que se presenta es la de conexidad-8. Se basa en
obtener una cadena de números que nos permitan almacenar y reconstruir la imagen en cualquier momento. Dicho código describe la fonna del contorno de una imagen binarizada. El código consiste en la asignación de números para las diferentes direcciones de avance tomando como referencia un punto inicial.
Detección de Contornos
Para la detección de los bordes. se utiliza una aproximación discreta del Laplaciano en dos dimensiones.
![]() °Vf=&¡
1 &¡
°Vf=&¡
1 &¡
a? <V
=-J( x,y- -J(x- y)-J(x+ y) - J(x,y+9+4/( x,y)
Detecci ón de contornos con Laplaciano .
Existen otras convoluciones como la dirección de contornos, el corrimiento de contornos, etc.
![]() 205
205

Filtro de mediana
Aqur el pixel de entrada es reemplazado por la media de los pixeles contenidos en una ventana alrededor del pixel, esto es.
l ( x,y) =media{l,( x+ k,y+l ), V' k,I e[-1,0,lJ}
0
donde:
/ 0 es la imagen de salida.
1 1 es la Imagen de entrada.
Generalmente el tamai'io de la ventana es escogido de tal forma que su dimensión sea impar.

Filtro medio.
Filtros paso-bajas , paso-altas
Como se sabe el filtro paso-bajas es una operación de promedios espaciales.
f (i , J )- V'1f(i ,J) =
. . j . . l[f (i + l,J) +/(i -1,J) ]}
= /(i, )+1/(r,J) -5 +/(i.J) +f (i,j +1)+/{i.J -1)
Como un filtro puede ser implementado por substracción de la salida del filtro paso bajas tomándolo como la entrada . Típicamente, el filtro paso bajas puede obtener relativamente un término largo del promedio espacial.
Los filtros paso bajas son usados para la disminución del ruido y la interpolación. Los filtros paso altas son útiles en la extracción de bordes.

Filtro paso bajas.
Fi ltro paso attas.
Escalamiento por Interpolación
La Interpolación mantiene el primer orden donde una lfnea recta es la primera en ser calculada entre los pixeles a lo largo del renglón. Entonces
los pixeles a lo largo de cada columna son
interpolados en una línea recta. Se sigue las siguientes ecuaciones.
|
v1(mür)=i.{m.n),0SmSM- 1,0:Sn5.N-l
v1(m.2n+ 1)=[1{111,n)+i.{m,n+ 1)).05.mSM- lOSnSN- l
|
111(2nvi)= m,n)
111(2m+i.,n) =[i{m,1+i{m+1.,n)JO. srm>M-10, :Sn.S N-1
donde:

M representa el máximo de columnas.
N representa el máximo de renglones.

Zoom de sección a 200%

Imagen a 0.60
Bl narlzaclón
Consiste en obtener la imagen en dos tonos, blanco y negro, a partir de un umbral dado.
O Si p( x ,y)< u
J (p (x,y ))= { 1 Si p(x,y) u
Espejo
Tiene por objetivo reordenar los pixeles de Ja Imagen original para generar una imagen final mediante un mapeo relación uno a uno entre los plxeles originales y finales en forma horizontal o vertical.
Espejo vertica1.
Rotación
La rotación de una imagen se ejecuta relativa a una Imagen, usualmente definida para ser el centro de la imagen en lugar del pixel (0,0) y es especificada por un ángulo. Las fórmulas utilizadas son:
P(x,y) = P( ycose - xsint9,ysin6> + xcose)
donde:
e
es el ángulo de rotación.

I magen binarizada con un umbral de 128.
Rotación de i magen a 45°.

APLICACIONES
Robótica
Una de las áreas en las que más se aplica el Procesamiento de Imágenes es en Ja Visión Artificial.
En nuestro grupo hemos desarrollado aplicaciones para la planeación automática de Robots Móviles. El método se describe a contlnuación:
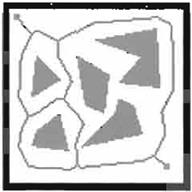
 A partir de una vista aérea del recinto donde evoluciona el robot, que incluye los obstáculos a
A partir de una vista aérea del recinto donde evoluciona el robot, que incluye los obstáculos a
Imagen Binarizada.

Engrosamiento de Obstáculos.

Esqueleto.
evitar, se binariza la Imagen y se engrosan los
obstáculos para dar un margen de seguridad a la trayectoria . El mapa de carreteras se construye por medio de la esqueletización del área libre. Postertormente se filtra Ja imagen con el fin de que el esqueleto resuttante sea 8-
conexo. Se eliminan los caminos sin salida del esqueleto utilizando técnicas de podado. Se obtiene el camino óptimo utillzando criterios de optimización para el problema en particular como el ancho del área libre y 1a longitud de cada rama. Finalmente se suaviza esta trayectoria utilizando una aproximación polinomial: B splines. Los resultados se presentan a continuación:
Concatenación delos puntos deinicio y fin.

Trayectoria óptima.
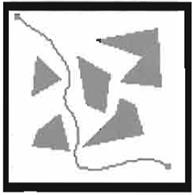
Aproximación polinomial.
![]() 208
208

CONCLUSIONES
La realización de este trabajo está enfocada a que mediante el uso de todas las técnicas mostradas se ayude a cualquier disciplina a obtener la lnfonnación de toda aquella Imagen que empleen en su trabajo.
La principal ventaja de este Upo de herramientas es que no es necesario contar con una platafonna demasiado potente, todas las técnicas descrttas, fueron implementadas en una computadora personal.
En disciplinas como robótica, medicina o microscopia son utilizadas de varias formas estas técnicas . El objetivo de este trabajo es agruparlas y presentarlas como una sola herramienta para el procesado de imágenes con formato estándar . Se realizaron una serie de
librerías empleando lenguaje e de tal forma que
la herramienta en cuestión resulte lo
suficientemente flexible para cada aplicación en particular.
REFERENCIAS
1. Jain, A. K., Fundamental of digital image processlng , Prentice-Hali, 1989.
2. Gonzélez, R. & Wlntz, P., Digital lmage processlng, Prentice-Hal1, 1987.
3. lbarra-Zannatha, J; Sosa Azuela , H. & González Hemández, H., A new roadmap approach for aufogulded vehiofes, Proceedings of the IEEE Transactlons on systems, man & cybemetics, (Por publicarse).San Antonio Texas,Octubre de 1984.
4. Rosenfeld, A. & Kak, A., Digital image processíng, Academic Press, 1982.
5. Ballard, D. & Brown, C., Computer Vision,
Prentice-Hall, 1982.