Regulación del voltaje en inversores UPS (Uninterruptible Power Supply) mediante un controlador basado en redes neuronales 1
Ing. Israel Espinosa Martínez Escuela de Ingeniería UNIVERSIDAD LA SALLE
Asesor: Octavio Rodríguez Torres
Recibido: Abril de 2004. Aceptado: Mayo de 2004
RESUMEN
En los sistemas eléctricos de potencia, existen diferentes fenómenos que distorsionan la forma de onda del voltaje que se utiliza en aplicaciones críticas, estas distorsiones han cobrado muchas vidas por no saber controlarlas, reducirlas o eliminarlas de forma segura. Es necesario suministrar energía de forma eficiente y segura, no sólo a procesos automatizados y de precisión sino también a aplicaciones de calidad y médicas como una sala quirúrgica o en algún instrumento cuya precisión en sus reportes de lectura dictaminan si una persona sigue con vida o necesita someterse a una operación.
Palabras claves: electrónica de potencia, distorsiones electricas, control por redes neuronales.
ABSTRACT
Within power electric systems there are different phenomena that distort the voltage wave shape used in critical applications. These distortions have cost a lot of lives by not knowing how to control them, reduce them, or eliminate them under a safe way. It is necessary to supply power efficiently and safely, not only to automated and precision processes but also to quality and medical applications such a as a surgery room or to some instrument accurate enough as to determine whether a person is still alive or needs to go into surgery.
INTRODUCCIÓN
Actualmente, la electrónica de potencia ha sido útil en el ámbito de la calidad y ahorro de energía proporcionando equipos que funcionan de manera extremadamente rápida, consumen menor energía y tienen mayor eficiencia que los equipos convencionales; sin embargo, la tecnología aunada a la comodidad y necesidad del hombre ha provocado el desarrollo de equipo cada vez más sofisticado, como rectificadores de 6 pulsos, UPS ( Uninterruptible Power Supply), computadoras de control extra rápidas, etc, cuyo efecto es altamente dañino a los sistemas eléctricos debido a que son fuentes generadoras de corrientes eléctricas que circulan por toda la red eléctrica a frecuencias extremadamente altas, provocando gran daño a los equipos de suministro, protección y medición, tales corrientes se denominan ondas armónicas.
Las ondas armónicas son ondas de corriente con frecuencias múltiplos de la frecuencia de línea y son extremadamente dañinas para el sistema de suministro eléctrico, provocando ineficiencia, pérdidas por calentamiento de los circuitos, activación no deseada de circuitos de protección, lecturas erróneas en equipos de precisión, etc.
Para algunos equipos antiguos o aquellos que requieren para su operación una señal senoidal, no trabajarán adecuadamente con una señal distorsionada y si se trata de equipos de medición, éstos proporcionarán lecturas erróneas. Un UPS es un dispositivo que emplea electrónica de potencia y se utiliza para proporcionar energía eléctrica limpia (onda de voltaje sin distorsión) cuando llega a fallar el suministro principal de energía, con el propósito de entregar energía eléctrica a la carga de forma constante.
Sin embargo, el UPS está compuesto además de otros circuitos de un inversor, que no es capaz de entregar energía limpia cuando se le aplican cargas no lineales, como una computadora o un rectificador trifásico industrial.
Una carga lineal es aquella que demanda una corriente de forma senoidal, sin embargo, las cargas no lineales son aquellas que contienen generalmente elementos de conmutación de alta velocidad, cuyo desempeño demanda corrientes de forma no senoidal.
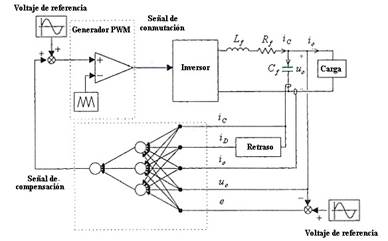
El esquema básico de los componentes de un UPS se muestra en la figura 1.
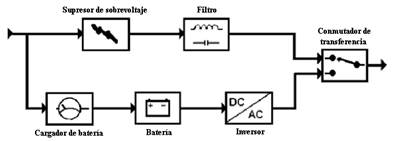
Figura 1. Esquema general de un UPS
La figura 1 muestra que en un UPS la energía eléctrica pasa por un supresor de voltaje para eliminar picos de alta frecuencia y ruido eléctrico y al mismo tiempo carga la energía de un banco de baterías. Cuando el interruptor se encuentra en la posición que indica la figura, la energía eléctrica entregada a la carga es la misma que proviene del suministro de energía pero filtrada, es decir, antes de la carga pasa por un filtro que se encarga de conservar la forma de onda.
Cuando ocurre una falla en el suministro principal de energía, el interruptor conmuta (cambia de posición) para poder descargar la energía del banco de baterías a través del inversor, el cual se encarga de convertir la energía de corriente directa (CD) que proporciona el banco de baterías en energía de corriente alterna (CA) que es la que generalmente usan las cargas eléctricas, lográndose de esta manera una continuidad de energía sin interrupciones.
Sin embargo, los inversores de las UPS no son capaces de proporcionar un voltaje senoidal cuando operan bajo condición de carga no lineal y generan corrientes armónicas de frecuencias demasiado altas, por lo tanto, se requiere tener control de la forma de la señal senoidal para que ésta tenga la menor distorsión. Se han hecho muchos intentos para poder solucionar este problema pero algunos de ellos todavía están en desarrollo. Se sabe que un sistema de control podría ser de utilidad para corregir dicha distorsión de manera favorable, pero un controlador convencional no resultaría útil para esto, debido a que necesita de un modelo matemático que describa el comportamiento del sistema.
El modelo matemático no puede obtenerse con facilidad porque no se conoce el comportamiento del sistema cuando cambia el tipo de carga aplicada. Existen diversas alternativas para controlar sistemas no lineales, entre ellas se encuentran los controladores que utilizan lógica difusa, redes neuronales y algoritmos genéticos, cada uno de ellos posee características particulares de control.
Se empleará la alternativa de un controlador basado en redes neuronales, porque entre sus características se encuentran el copiar esquemáticamente la estructura del cerebro humano y simular algunas de sus funciones como la gran capacidad de memoria, la adaptación al entorno, la capacidad de aprender de la experiencia y la tolerancia a fallos. Pero, la más importante es que puede emplearse como un estimador del modelo matemático del sistema y cuando cambien las condiciones en la carga, este controlador tiene que ser capaz de estimar el modelo matemático y controlar su comportamiento reduciendo la distorsión en la señal de salida.
Una neurona artificial es una unidad de procesamiento de información que es fundamental para la operación de una red neuronal. En la figura 2 se muestra la forma más común de una neurona biológica y en la figura 3 se muestra el modelo no lineal de una neurona artificial, con el propósito de hacer una analogía.
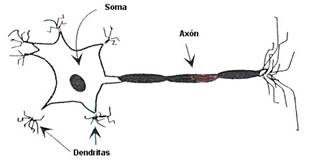
Figura 2. Forma típica de una neurona biológica
La figura 2 muestra que la neurona está formada por las dendritas, que son las encargadas de recibir información; el soma, que es donde se llevan a cabo las operaciones moleculares y biológicas; y, el axón, que es el canal de comunicación con otras neuronas.
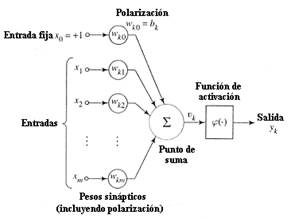
Figura 3. Modelo no lineal de una neurona artificial
La figura 3 muestra que una neurona artificial se asemeja a una neurona natural en que ambas tienen (como sucede normalmente en cualquier sistema) canales de entrada, elementos de procesamiento o de cálculo y canales de salida, es decir, en la neurona biológica los canales de entrada son las dendritas y en la neurona artificial son terminales (cables, alambres, etc) por donde circulan las señales eléctricas, el elemento de cómputo en la neurona biológica es el soma, mientras que en la artificial es un elemento sumador (circuito electrónico) y finalmente el canal de salida en la neurona biológica es el axón y en la neurona artificial es una terminal o un cable.
Para poder tener un buen desempeño en el control de un inversor UPS y reducir significativamente los costos, se debe seleccionar la estructura de la red neuronal de forma adecuada.
Se proponen circuitos electrónicos, que una vez interconectados, tienen un funcionamiento análogo a la red neuronal artificial.
Primeramente se determina la importancia de las entradas de la red neuronal mediante el uso del programa Neuro Shell Predictor, de acuerdo con esto, se selecciona la red neuronal (número de entradas suficientes, número de capas ocultas y una salida).
Después se entrena dicha red en el modo fuera de línea y se obtienen los valores correspondientes de los pesos sinápticos, una vez hecho esto, se diseñan los circuitos generadores de sigmoide (función con la que operan generalmente las neuronas artificiales) y se interconecta el número de neuronas correspondiente para armar la red neuronal.
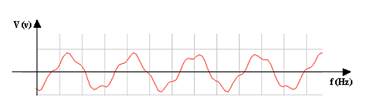
La figura 4 muestra los resultados obtenidos después de ejecutar el programa para determinar la importancia de las entradas.
El criterio utilizado para dicha selección se basó en valores entre uno y cero, es decir, si algún parámetro muestreado resultaba con un valor de importancia de cero, no se tomaba en cuenta y se eliminaba de la muestra, debido a que el tamaño de la red no se ve influenciada por su presencia.
Es por eso que en la figura cuatro sólo se muestran los valores más importantes y los demás parámetros se eliminaron definitivamente.
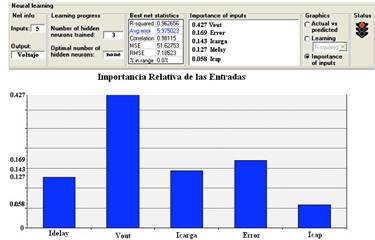
Figura 4. Gráfica de la importancia de las entradas de la red neuronal
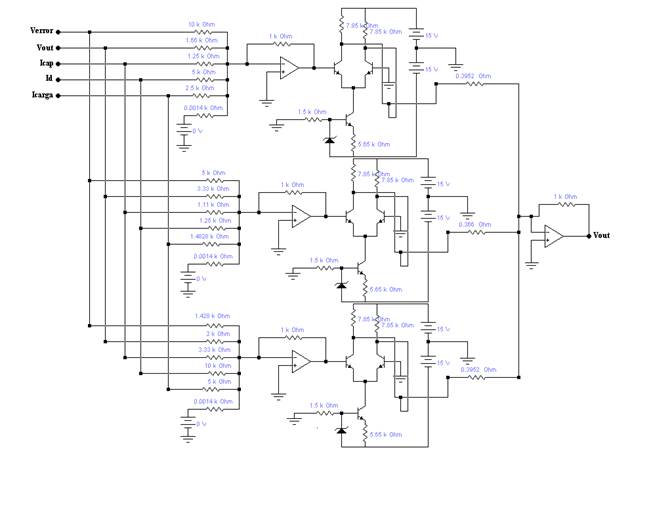
La figura 5 muestra el circuito analógico de la red neuronal previamente entrenada, así como las entradas para las señales muestreadas y la salida de la señal deseada.
También se muestra que los valores que contienen los dispositivos discretos son fijos, es decir, se entrenaron para una cierta condición de carga no lineal y pueden llegar a cambiar si las condiciones de carga así lo ameritan.